Исследование электромеханического регулятора мощности дуговой сталеплавильной печи с асинхронным электродвигателем
В.П. Рубцов, К.А. Елизаров, В.А. Елизаров
Предлагается схема релейного регулятора мощности дуговой сталеплавильной печи, построенная на базе нерегулируемого асинхронного короткозамкнутого двигателя. Приводятся структурная схема регулятора и схема модели, составленная в среде Simulink. На основании исследований доказывается возможность обеспечения устойчивой работы регулятора с близким к апериодическому характером переходных процессов и увеличения быстродействия регулятора в сравнении с традиционным регулятором с двигателем постоянного тока.
Ключевые слова: релейный регулятор мощности, дуговая печь, нерегулируемый асинхронный двигатель, модель регулятора, переходные процессы.
Введение
Дуговые сталеплавильные печи (ДСП) нашли широкое применение в черной металлургии для производства различных сортов стали. По технологическим причинам электрический режим ДСП нестабилен в течение всей плавки и сопровождается постоянными колебаниями мощности, вводимой в печь. Отклонения электрического режима от номинального снижают её производительность и технико-экономические показатели [1]. Изменение мощности в ДСП осуществляется путем перемещения электродов. Регуляторы мощности выполняют отдельно для каждой из трех фаз питающей сети, что обеспечивает их независимую работу. Традиционно для перемещения электродов в ДСП используются электрогидравлические или электрические приводы с двигателем постоянного тока независимого возбуждения [2]. Мощность двигателей, используемых для перемещения электродов в ДСП, составляет 0,5—15 кВт.
Структура электрогидравлического привода в течение длительного времени не претерпевает существенных изменений, в то время как номенклатура электрических приводов в последнее десятилетие существенно расширилась благодаря достижениям силовой полупроводниковой техники. Промышленностью широко выпускаются транзисторные преобразователи частоты, на базе которых освоены частотно-регулируемые приводы с асинхронными короткозамкнутыми двигателями, конкурентоспособные по регулировочным свойствам, массогабаритным показателям и стоимости с приводами постоянного тока. Всё большее применение получают тиристорные регуляторы напряжения, на базе которых выполняют устройства плавного пуска асинхронных двигателей [3]. Вносят свою специфику в управление приводами и современные микропроцессорные средства. Отмеченные тенденции делают целесообразным поиск новых структур регуляторов мощности ДСП, в большей степени отвечающих современному состоянию электрических приводов. Замена в регуляторах мощности ДСП двигателей постоянного тока, имеющих контактный коллекторно-щеточный узел, существенно ухудшающие эксплуатационные показатели двигателя, работающего в условиях высоких температур и запыленности среды, на асинхронные короткозамкнутые двигатели представляется важной народнохозяйственной задачей.
Функциональная схем релейного регулятора
В данной работе исследуется возможность построения регулятора мощности ДСП на основе нерегулируемого привода переменного тока с асинхронным короткозамкнутым двигателем. Управление асинхронным двигателем осуществляется прямым подключением к сети с помощью контакторов или тиристорных пускателей [3]. Для уменьшения пусковых токов двигателя и «бросков» пускового момента, т.е. для формирования переходных процессов, возможно использование реверсивных тиристорных устройств плавного пуска (УПП). Последнее обстоятельство может оказаться крайне важным для работы именно регуляторов мощности ДСП, подвеска электродов в которых имеет заметную упругость. Применение нерегулируемого привода в регуляторе мощности ДСП возможно только при построении релейной системы управления, для которой характерен автоколебательный режим работы. Строго говоря, как регулятор скорости привод с любым нерегулируемым двигателем может работать только в автоколебательном режиме, который недопустим в регуляторах мощности ДСП. Однако регулятор мощности ДСП по существу представляет собой следящую систему, управляющую перемещением (т.е. положением) электродов. В следящей релейной системе возможно получение близких к апериодическим переходных для устойчивой работы регулятора мощности ДСП. Таким образом, основная задача исследования предлагаемого релейного регулятора мощности ДСП — определись возможность обеспечения апериодического характера переходных процессов. Предпосылкой успешного решения этой задачи можно считать тот факт, что, например, промышленный регулятор мощности ДСП с исполнительным двигателем постоянного тока настраивается на режим работы, близкий к релейному [2].
На рис. 1 приведена функциональная схема предлагаемого релейного регулятора мощности ДСП с исполнительным асинхронным короткозамкнутым двигателем. Вертикальное перемещение электрода ДСП осуществляется механизмом, приводимым в движение асинхронным электродвигателем М. Для исключения самопроизвольного перемещения электрода под действием веса вертикально перемещаемых масс (и тех случаях, когда отсутствуют противовесы, разгружающие двигатель от несбалансированной вертикальной нагрузки) в систему может быть введен электромагнитный тормоз, управление которым осуществляется релейным регулятором (РР). Управление электромагнитным тормозом можно рассматривать как дополнительную функцию РР, основной функцией которого является управление реверсивным регулятором напряжения (РРН). Реверсивный регулятор напряжения может быть выполнен на двух контакторах, изменяющих чередование фаз поступающего на двигатель напряжения, или в виде тиристорного пускателя [3]. В последнем варианте может быть использовано устройство плавного пуска.
На входы РРМ поступают дискретные сигналы от релейного регулятора на подъем или опускание электрода. На входы РР поступают аналоговые сигналы от трансформаторов тока и напряжения (на схеме не показаны), пропорциональные соответственно току дуги Iд и напряжению на дуге Uд. Релейный регулятор может быть выполнен на основе специализированного программируемого микропроцессорного контроллера или реализован в виде программы в универсальном вычислительном устройстве, например персональном компьютере. Независимо от способа реализации PP должен включать в себя нелинейное звено с трехпозиционной релейной характеристикой, приведенной на рис. 2. Наличие такого элемента — необходимое условие обеспечения апериодического характера переходных процессов. Характерной особенностью трехпозиционного релейного элемента является наличие зоны нечувствительности шириной δ в области малых значений входного сигнала Uвх. Изменение входного сигнала Uвх внутри зоны нечувствительности не приводит к изменению выходною сигнала Uвых.
 Рис. 1. Функциональная схема релейного регулятора мощности ДСП Рис. 1. Функциональная схема релейного регулятора мощности ДСП
Основной задачей исследования рассматриваемой релейной системы управления перемещением электрода можно считать установление возможности достижения апериодического характера переходных процессов и области допустимого сочетания параметров входящих в систему элементов. Характер переходных процессов в релейной системе регулирования в значительной степени зависит от значения ширины зоны нечувствительности δ регулятора, а также от соотношения постоянных времени Т входящих в неё элементов. Ширина зоны нечувствительности δ РР в основном определяет и точность системы регулирования, которая в регуляторах мощности ДСП должна быть не более 1,5 %. Для достижения таких показателей в релейной системе регулирования требуется настройка регулятора. В промышленных электромеханических регуляторах мощности ДСП максимальная скорость перемещения электрода составляет 1,5-2,0 м/мин [2]. Эта скорость существенно влияет на производительность как регулятора мощности, так и печи, поскольку определяет потери времени на зажигание дуги и ликвидацию технологических коротких замыкании. В промышленных регуляторах мощности ДСП ограничение максимальной скорости перемещения электродов обусловлено трудностями обеспечения желаемого апериодического характера переходных процессов, в значительной степени зависящего от максимальной скорости перемещения электрода.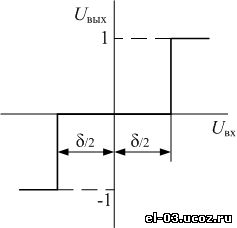 Рис. 2. Характеристика трехпозиционного релейного элемента, построенная в относительных единицах Рис. 2. Характеристика трехпозиционного релейного элемента, построенная в относительных единицах
Для исследования рассматриваемой нелинейной системы была разработана модель, представленная в виде структурной схемы на рис. 3. Электрическая дуга в схеме рис. 3 представлена в виде нелинейного безынерционного элемента с вольт-амперной характеристикой, определяемой выражением:
Uд=a*lд(Iд),
где Uд — напряжение на дуге; Iд — ток дуги; lд — ее длина; а — проводимость столба дуги.
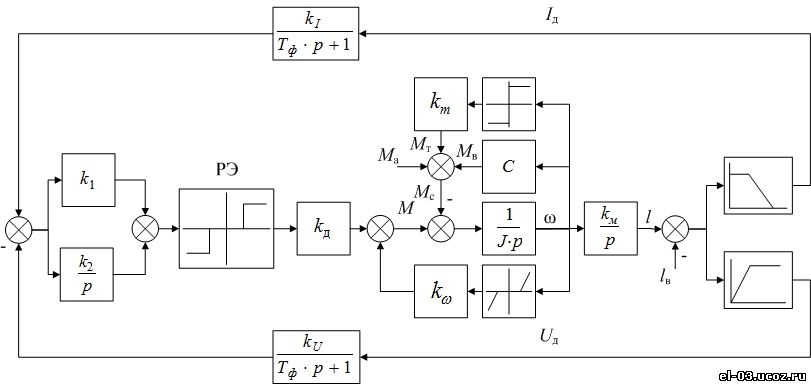 Рис. 3. Структурная схема релейной системы регулирования мощности ДСП Нелинейные блоки ограничения, входящие в модель ДСП, исключают неопределенность в режимах холостого хода и короткого замыкания. Модель собственно ДСП дополняют фильтры, устанавливаемые на выходах датчиков тока и напряжения, которые представлены инерционными звеньями первого порядка с передаточными функциями соответственно Следует отметить, что инерционность фильтров в каналах обратной связи весьма значительна, достигает нескольких секунд и оказывает существенное, а в некоторых случаях и определяющее влияние на качество регулирования [2]. Следовательно, учет инерционности фильтров совершенно необходим для получения достоверных результатов при исследовании. Для повышения точности и качества регулирования в систему априори введен пропорционально-интегральный регулятор (ПИ-регулятор), включающий в себя пропорциональное звено с коэффициентом передачи k1, и интегральное звено с передаточной
функцией k2/p. ПИ-регулятор традиционно вводят в исполнительный привод для улучшения качества регулирования.
Постоянная времени электрической части асинхронною двигателя намного меньше постоянной времени механической части, т.е. ею можно пренебречь и электрическую часть нерегулируемого привода с асинхронным короткозамкнутым двигателем представить в виде усилительного звена с коэффициентом передачи кл, подключенного к выходу релейного элемента, имеющего зону нечувствительности (рис. 3). При этом реальная механическая характеристика асинхронного двигателя (рис. 4) аппроксимируется двумя прямыми.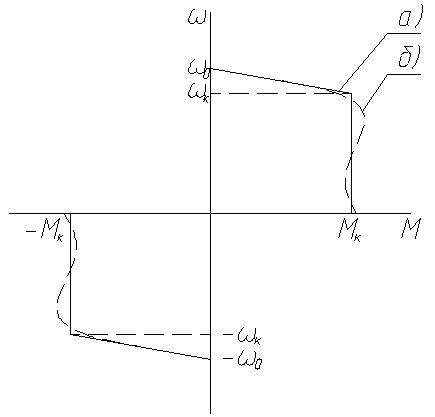 Рис. 4. Механическая характеристика асинхронного короткозамкнутого двигателя Рис. 4. Механическая характеристика асинхронного короткозамкнутого двигателя: а) исходная характеристика; б) аппроксимированная характеристика
Изменение положения электрода относительно шихты, происходящее при обрывах дуги и технологических коротких замыканиях, учитывается в виде внешнего возмущающего воздействия lв, поступающего на вход блока сложения.
Приведенная на рис. 3 структурная схема дает возможность проводить анализ системы в различных режимах работы ДСП, включая автоматическое зажигание дуги, ликвидацию коротких замыканий, изменение питающего напряжения и уставки мощности. Исследование данной системы позволяет установить возможность достижения требуемых показателей точности и качества регулирования, а также определить параметры элементов и ширину зоны нечувствительности, при которых обеспечивается апериодический характер переходных процессов.
Исследование РР
Анализ и синтез рассматриваемой нелинейной системы регулирования мощности ДСП целесообразно проводить, методами структурного моделирования, используя, например, пакет прикладных программ MatLAB Simulink.
Для большей наглядности анализ и синтез системы (рис. 5) проводились в абсолютных величинах для реального регулятора мощности ДСП.
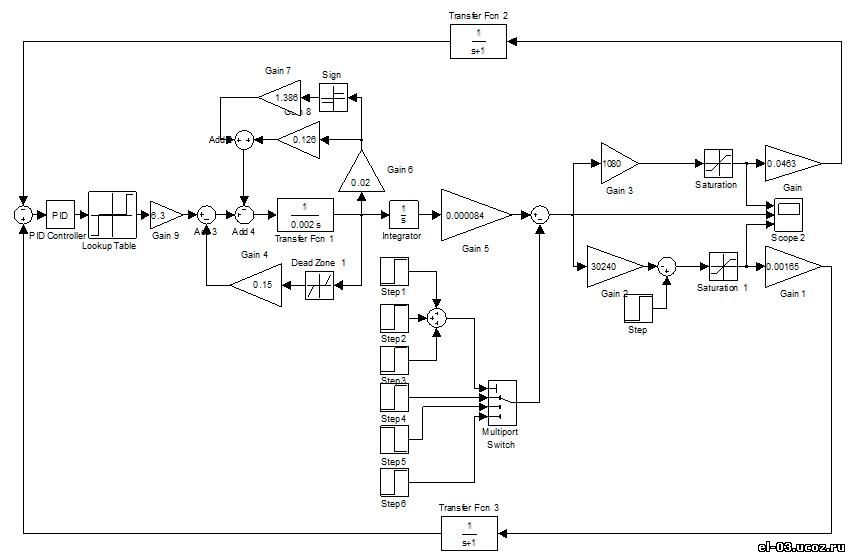
Рис. 5. Схема модели релейной системы регулирования мощности ДСП в пакете прикладных программ MatLAB Simulink
Асинхронный двигатель с короткозамкнутым ротором 4А71А2УЗ имеет следующие параметры [4]:
Номинальное напряжение.......... 220/38О В
Номинальная мощность........0,75 кВт
Синхронная частота вращения ........ 3000 об/мин
Коэффициент полетного действия .... 77 %
Коэффициент мощности.......... 0.87
Кратность максимального момента к номинальному....................2.2
Кратность пускового момента к номинальному....................2.0
Кратность минимального момента к номинальном)........1.2
Кратность пускового тока к номинальном..........5.5
Для выбранной печи ДСП-0.5 характерны следующие параметры [5]:
Номинальное вторичное напряжение.........216 В
Номинальный ток...........1680 А
Кратность тока короткого замыкания.........3,6
Примем критическую длину дуги (размер межэлектродного промежутка, при котором дуга разрывается) равной 20 см.
На первом этапе исследования проводились применительно к регулятору мощности без дополнительного электромагнитного тормоза (ЭМТ). При этом обеспечивалось условие отсутствия «самохода» (опускание электрода при отсутствии момента М на валу двигателя). Условие неподвижности электрода в положении равновесия в системе, когда сигнал на входе РР равен нулю, может быть записано в виде
-Ма + Мс > 0,
т.е. момент Ма, обусловленный весом подвижной части механизма перемещения электрода, должен уравновешиваться моментом трения Мт в передаче. Это условие в реальных регуляторах мощности, как правило, выполняется.
Исследования проводились путем расчета. На модели (рис. 5) рассчитывались переходные функции перемещения электрода lэ(t), тока дуги Iд(t) и напряжения на дуге Uд(t) для режима зажигания дуги из режима короткого замыкания, определяемого сигналами Uд=0; Iд=Iк и lэ=0.
Режим автоматического зажигания дуги можно считать основополагающим для работы регулятора мощности ДСП. Он обеспечивается определенной организацией сигналов обратной связи Iд и Uд. Как можно заметить, в регуляторе мощности (см. рис. 1) сигнал задания режима отсутствует в явном виде. Работа следящей системы, в частности режим автоматическое зажигание дуги, обеспечивается подачей на вход РР сигнала Uвх=ki*Iд-ku*Uд. Система приходит в равновесие при выполнения условия Uвх = 0.
На рис. 6 приведены осциллограммы Iд(t), Uд(t) и lэ(t), рассчитанные на модели рис. 5 для приведенных выше параметров ДСП и привода. Там же (рис. 6) для сравнения даны аналогичные переходные функции Iд(t), Uд(t) и lэ(t) (кривые а)), рассчитанные для регулятора с приводом постоянного тока. Мощность двигателя постоянного тока соответствует мощности асинхронного двигателя. Время и остальные величины на осциллограммах рис. 6 являются реальными и отражают основные показатели работы регулятора.
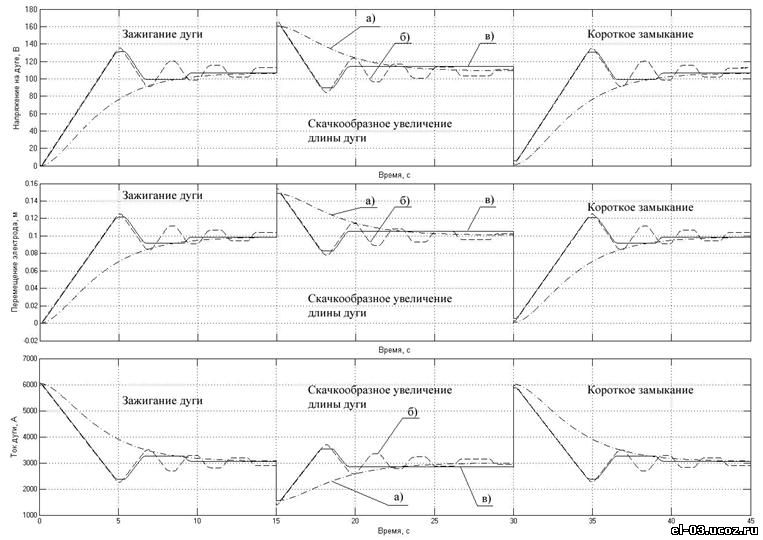 Рис. 6. Рассчитанные на модели осциллограммы переходных функций напряжения на дуге Uд(t), перемещения электрода lэ(t) и тока дуги Iд(t) дли регулятора с приводом постоянного тока (кривые а)), с ненастроенным релейным регулятором (кривые б)) и с настроенным релейным регулятором (кривые в)). Рис. 6. Рассчитанные на модели осциллограммы переходных функций напряжения на дуге Uд(t), перемещения электрода lэ(t) и тока дуги Iд(t) дли регулятора с приводом постоянного тока (кривые а)), с ненастроенным релейным регулятором (кривые б)) и с настроенным релейным регулятором (кривые в)). Как показывает анализ осциллограмм рис 6. качество переходных процессов зависит от соотношения постоянных времени фильтров датчиков обратной связи Тф и ширины зоны нечувствительности δ трехпозиционного релейного элемента. Было установлено, что параметры ПИ-peгулятора практически не оказывают влияния на качество переходных процессов, что позволяет в дальнейшем не вводить его в структуру регулятора. При постоянной времени фильтра Тф=1 с и δ=0,3 переходные процессы в релейном регуляторе (рис 6. кривые б)) имеют колебательный характер с медленным затуханием. Увеличение ширины зоны нечувствительности до δ=0,7 позволяет получить переходные процессы, близкие к апериодическим, с затуханием в течение одного периода колебаний (рис. 6. кривые в)).
Таким образом, проведенные исследования показывают, что в рассматриваемой структуре РР с нерегулируемым асинхронным двигателем удается получить близкие к желаемым переходные процессы с приемлемой точностью. Этот вывод иллюстрируют приведенные на рис. 6 осциллограммы наиболее характерных для дуговой печи режимов работы: зажигания дуги из режима короткого замыкания, скачкообразного увеличения длины дуг с последующим восстановлением установившегося режима и режима короткого замыкания (обвал шихты) с последующим подъемом электрода и повторным зажиганием дуги.
Выводы
1. Важнейшим результатом сравнения РР мощности ДСП с нерегулируемым приводом на базе асинхронного короткозамкнутого двигателя с регулятором, выполненным на двигателе постоянного тока, является факт существенного повышения быстродействия, обеспечиваемого PP. На осциллограммах рис. 6 отчетливо видно, что время регулирования в РР tр=6 с (время первого достижения заданного значения), в то время как в регуляторе с двигателем постоянного тока (рис 6, кривые а)) tр=15 с, т.е. в 2,5 раза больше. Это обусловлено, с одной стороны, меньшей инерционностью асинхронного двигателя в сравнении с двигателем постоянного тока, а с другой — близким к оптимальному управлением, реализуемым в РР.
2. Исследования подтвердили возможность достижения в РР близкого к апериодическому характера переходных процессов с приемлемой для технологии точностью регулирования.
Литература
1. Сидоренко М.Ф., Косырев А.И. Автоматизация и механизация электросталеплавильного и ферросплавного производств. — М.: Металлургия, 1975.
2. Электрооборудование и автоматика электротермических установок: Справочник. А.П. Альтгаузен, И.М. Бершицкий, М.Д. Бершицкий и др. / под ред. А.П. Альтгаузена, М.Д. Бершицкого, М.Я. Смелянского, В.М. Эдемского. — М.: Энергия, 1978.
3. Электротехнический справочник в 4 т. Т. 4 Использование электрической энергии. / под общ. ред. профессоров МЭИ В.Г . Герасимова, А.Ф. Дьякова, Н.Ф Ильинского и др. 9-е изд. — М.: Издательство МЭИ, 2004.
4. Справочник по электрическим машинам в 2 т. Т. 1 / под ред И.П. Копылова, Б.К. Клокова — М.: Энергоатомиздат, 1988.
5 Электрические промышленные печи. Дуговые печи и установки специального нагрева. / под ред. А.Д. Свенчанского — М.: Энергоиздат, 1981.
Вестник Московского Энергетического Института. - 2010. - №5. - с. 54-60.
 Скачать статью в формате *.pdf
Категория: Статьи | Добавил: DEADalus (10.01.2011) Скачать статью в формате *.pdf
Категория: Статьи | Добавил: DEADalus (10.01.2011)
|









